

ME team wins 2022 ASME Rudolf Kalman Best Paper Award
December 8, 2022
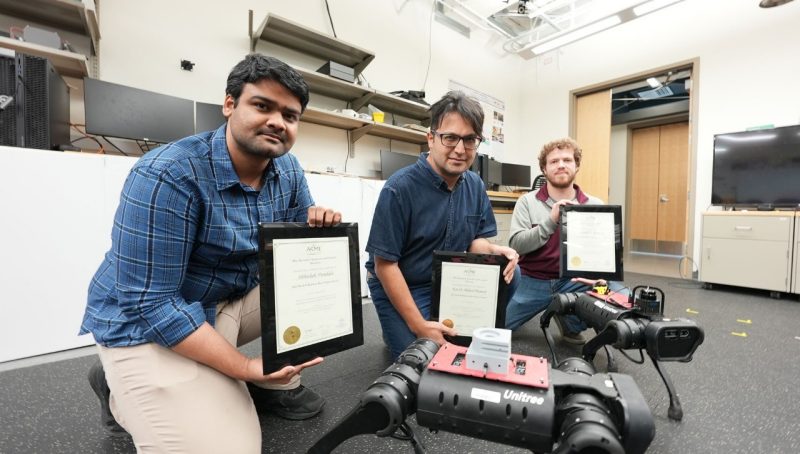
PhD students Randall T. Fawcett, Abhishek Pandala, and Jeeseop Kim, together with Assistant Professor Kaveh Akbari Hamed, have been selected to receive the 2022 ASME Rudolf Kalman Best Paper Award for their paper entitled "Real-time planning and nonlinear control for quadrupedal locomotion with articulated tails'' published by ASME Journal of Dynamic Systems, Measurement, and Control. This award is given annually by the Dynamic Systems and Control Division of ASME to the authors of the best paper published in the ASME Journal of Dynamic Systems Measurement and Control during the preceding year.
Fawcett is a third-year PhD student in the Hybrid Dynamic Systems and Robot Locomotion (HDSRL) lab, directed by Akbari Hamed. Fawcett works on distributed planning and control of collaborative and multi-agent-legged robots with data-driven and predictive control techniques.
Pandala is a fourth-year PhD student in the HDSRL lab who works on designing robust optimal control techniques for agile quadrupedal locomotion.
Kim is a former PhD student in the lab who graduated in August 2022. He is currently a postdoctoral research fellow at Caltech. His PhD work addressed the design of distributed model predictive control algorithms for cooperative locomotion and transportation by legged robots.
Akbari Hamed's research goal is to establish a firm foundation for creating innovative algorithms to systematically design resilient and intelligent controllers for various dynamical systems with nonlinear and hybrid natures, including autonomous-legged robots and cooperative multi-agent systems.
-
Article Item
 Decoding the arms of an octopus , article Date: 11/21/2024
Decoding the arms of an octopus , article Date: 11/21/2024 -
Article Item
-
Article Item
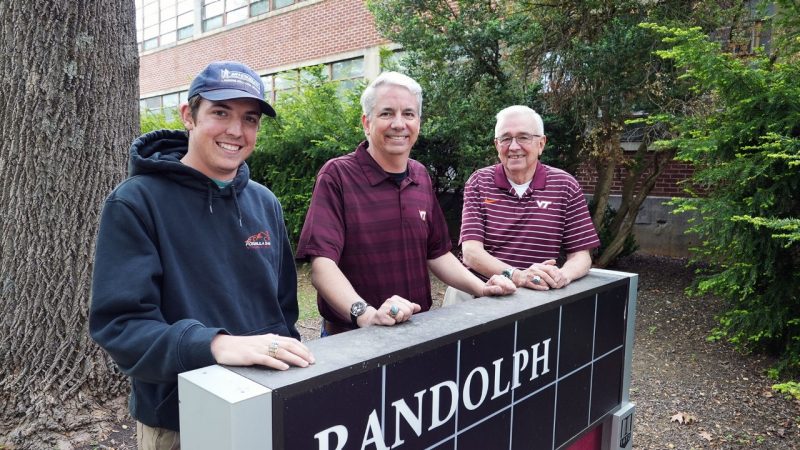 A legacy of three mechanical minds drives on , article Date: 11/18/2024
A legacy of three mechanical minds drives on , article Date: 11/18/2024 -
Article Item
 Cadets chosen to highlight the colors at the Duke game , article Date: 11/15/2024
Cadets chosen to highlight the colors at the Duke game , article Date: 11/15/2024 -
Article Item
-
Article Item
 All treats, no tricks , article Date: 10/25/2024
All treats, no tricks , article Date: 10/25/2024


Page 1 of 52 | 312 Results